ここではArduinoを用いてサーボモーターを制御する方法について見ていきます。サーボモーターとしてSG90を用います。データシートはここにあります。https://akizukidenshi.com/catalog/g/g108761/

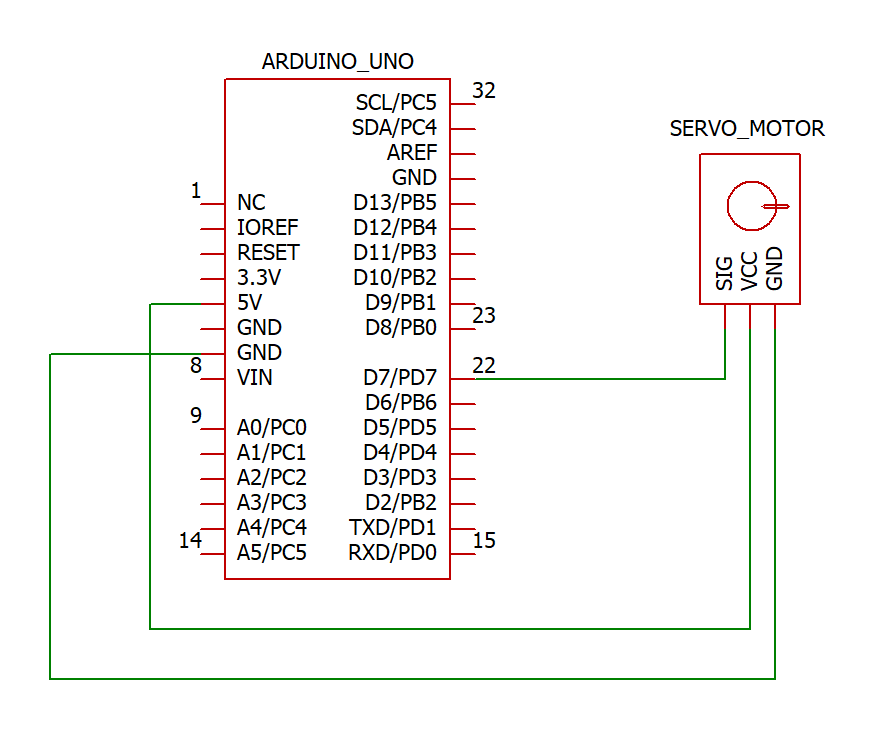
回路図は右のようになります。なお,回路図中のSIG,VCC,GNDはデータシートの図中のPWM(オレンジ),Vcc(赤),Ground(茶)にそれぞれ相当します。
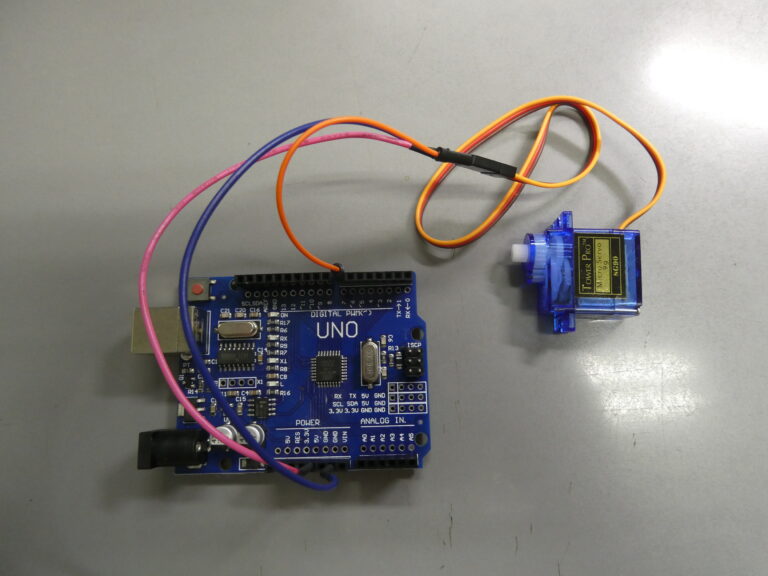
実際には下のような配線になります。(引用:https://www.tinkercad.com/things/glAaqDdoRbc)


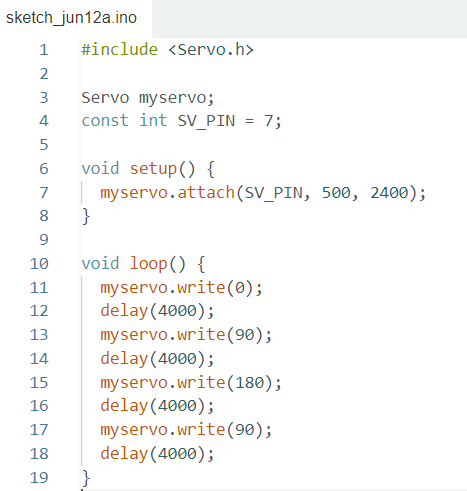
サーボモーターを動かすプログラムは左のようになります。
1行目:サーボモーターを動かすためのライブラリーをインクルードします。
2行目:myservoというオブジェクトを作成します。
4行目:Arduinoの7番ピンにサーボモーターのPWM端子を接続します。
7行目:サーボモーターを使う準備をします。500, 2400はデータシートにある0.5~2.4msに対応しています。
11~12行目:サーボモーターの腕を0度の位置に動かします。そして,0.4sec待機します。
13~14行目:サーボモーターの腕を90度の位置に動かします。そして,0.4sec待機します。
15~16行目:サーボモーターの腕を180度の位置に動かします。そして,0.4sec待機します。
17~18行目:サーボモーターの腕を90度の位置に戻します。そして,0.4sec待機します。
次のループで,元の0度の位置に戻ります。
このプログラムをArudinoに書き込むと以下のように動作します!


コメント